
DRONE TECHNOLOGY

Introducing my product BrennS uav hand controlled rc drone.
The term “drone” usually refers to any unpiloted aircraft. Sometimes referred to as “Unmanned Aerial Vehicles" (UAVs), these can carry out an impressive range of tasks, ranging from military operations to package delivery. Drones can be as large as an aircraft or as small as the palm of your hand. Because drones can be controlled remotely and can be flown at varying distances and heights, they make perfect candidates to take on some of the toughest jobs in the world. They can be found assisting in a search for survivors after a hurricane, giving law enforcement and military an eye-in-the-sky during terrorist situations and advancing scientific research in some of the most extreme climates on the planet. This drone is the beginning of drone innovation. Drone technology is constantly evolving as new innovation and big investment are bringing more advanced drones to the market.


RC Technical Parameters
Aircraft Technical Parameters
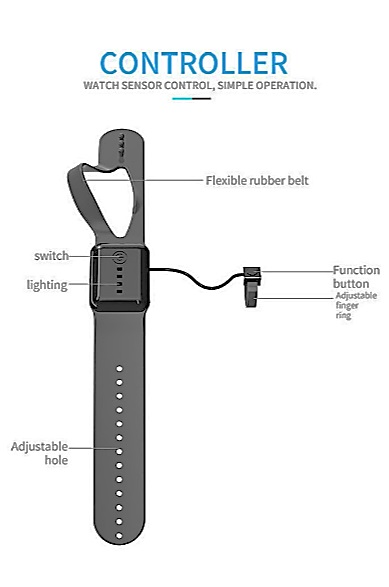
TRANSMITTER
Main Body Button
1.The first time short press for start up
2.The second time short press for reset
3.Short press is landing slowly function in flight
4.Long press the aircraft for 1 second to emergency stop, 3 seconds to turn off
Finger Button
1.The first time short press for take off to 1.2 meters
2.Short press is roll function in flight
3. Short press quickly 3 times in flight to enter into the infrared obstacle avoidance mode
4. Long press the remote control to switch to (throttle and steering) function
READY TO FLY
1. Please put the aircraft on ground. Long press the switch for 1 second to turn in, the indicator lights change from flash quickly to flash slowly. Waiting for code.
2. Short press the Gravity sensor remote control switch, the remote control indicator light flashes slowly. 3 times at the same time and turns into long light indicating the end of the code. The aircraft indicator light changes from flash slowly to long light, indicating that the code is successful.
3. Short press the remote control finger button to take off to 1.2 meters
HOW TO CONTROL
1. Long press the remote control finger button and let the hand up or down, the aircraft will ascend or descend accordingly.
2. Long press the remote control finger button and let the hand to the left or right, the aircraft will turn left or right accordingly.
3.Loosening the remote control finger button and let the hand down or up, the aircraft will move forward or backward.
4.Loosening the remote control finger button and let the hand to left or right, the aircraft will turn left or right accordingly.
MAIN FUNCTION
Please put the aircraft on the ground, long press the switch for 1 second to turn on. The indicator lights change from flash quickly to flash slowly. Pick up the aircraft and throw it out, the aircraft will hover in the air. Short press the power button to reset. Long press the switch for 1 second to turn off. When the aircraft is into throw flying induction mode, the watch remote control will be switched on and connect with aircraft for connection successfully, and throw flying induction mode will exit out at the same time. When it is flying in the air into throw flying induction mode, the bottom of the aircraft will be ascended when the hand is held rapidly, and when the hand is held continu- ously the bottom of the aircraft will be descended.
Short press the remote control finger button in flight, the aircraft indicator light flashes quickly and you can tilt the remote control to roll accordingly. When the remote control is motionless for 2 seconds, it will exit the roll function.
3. Slow descent
Short press the remote control main body button in flight, the aircraft will land slowly on the ground to stop flying.
4. Emergency stop
When the aircraft loss control in flight, long press the remote control main body button for 1 second to emergency stop.
WATCH VIDEO TUTORIAL
