
|
EL SUBMARINO ALEMÁN TIPO XXI
(Primera parte)
Agradecemos a Gonzalo Salinas, de Rosario (Argentina) el envío de ésta nota

Al avanzar la Segunda Guerra
Mundial Alemania había perdido poder en el mar. El radar y los nuevos
sonares cambiaron esta táctica y los u-boat, que antes eran temibles,
ahora eran fácilmente ubicados y destruidos. Alemania necesitaba un nuevo
tipo de submarino, uno que no dependiera de operar en la superficie y que tuviera
elevada velocidad de ataque y escape en inmersión. Es así que
se diseña y se construye hacia el final de la guerra el submarino tipo
XXI. Esta nave produce un salto tecnológico muy grande en la historia
de la Segunda Guerra Mundial. Con tales consecuencias que los aliados construyen
submarinos basados en el diseño alemán hasta bien entrada la década
del 50. Es la primera nave en la historia que se convierte en verdadero submarino,
opera siempre sumergido. Supera la velocidad de cualquier destructor o fragata.
Puede disparar sus torpedos sumergido sin usar, para los cálculos
de tiro, los periscopios y utilizando en reemplazo dispositivos eléctricos.
Es inmune al radar y a los nuevos equipos de escucha de sonar, ya que era muy
silencioso. Su construcción se realizaba en serie, en 8 partes o módulos
que provenían de otros astilleros y se soldaban juntas en el astillero
principal; acelerando de esta forma su terminación y botadura.
La entrada en servicio de las primeras unidades no llegó a tiempo
para disparar sus torpedos antes de que Alemania se rindiera.
Características técnicas del submarino tipo XXI
El proyecto original, denominado
Pr.476, fue presentado el 1 de octubre de 1942. Se basaba en el submarino experimental
Wa.201, propulsado por turbina Walter, entonces en estudio. El proyecto definitivo
fue ultimado en la primavera de 1943 y se previó su construcción
en plazos bastante cortos.
La Kriegsmarine deseaba que el nuevo modelo fuese capaz de alcanzar los
18 nudos en inmersión durante una hora y media por lo menos, y los 12-14
nudos durante por lo menos 10 horas. En inmersión silenciosa, a régimen
reducido, se exigía una media de 5 nudos durante 60 horas. Téngase
en cuenta que los convoyes de la época navegaban a 7-10 nudos de media.
La potencia de los motores eléctricos era el triple de la instalada en
los sumergibles alemanes normales, y las características del casco debían
adaptarse a las elevadas velocidades, ofreciendo además un elevado coeficiente
de seguridad. Se adoptaron por consiguiente, formas muy hidrodinámicas
y se previó una cota alcanzable de 330 metros, así como una relación
de masas, velocidad y superficie de los timones horizontales que permitiesen
bajar a 135 m en solo 20 segundos (el tipo VII tardaba 30 segundos en desaparecer
de la superficie.
El primer ejemplar fue alistado en sólo 19 meses, era el U 2501,
botado el 12 de mayo de 1944 y entrado en servicio el 27 de junio siguiente.
Como innovación respecto de sumergibles anteriores, el tipo XXI disponía
de heladera para los alimentos frescos y también de un sistema de aire
acondicionado.
Casco y superestructuras
 Se empleó la estructura
de doble casco total, con relación eslora/manga de 11,6. El conjunto
estaba formado por 8 secciones prefabricadas. El desplazamiento del buque, descargado
y en seco, era de 1280 t, y en condiciones estándar la distribución
de masas y sus porcentajes eran como sigue:
Se empleó la estructura
de doble casco total, con relación eslora/manga de 11,6. El conjunto
estaba formado por 8 secciones prefabricadas. El desplazamiento del buque, descargado
y en seco, era de 1280 t, y en condiciones estándar la distribución
de masas y sus porcentajes eran como sigue:
El casco resistente de sección en 8, medía 60,5 m de longitud (eslora) por 6,7 m de anchura (manga) (7,6 m incluidos los timones de inmersión), y el puntal alcanzaba los 7,7 m.
La original forma y estructura
se debía a la necesidad de habilitar un gran volumen interno sin tener
que recurrir a dimensiones exageradas, sobre todo en manga. La disposición
en doble cilindro intersecante permitía reducir la manga en favor de
la altura, reduciendo así la resistencia al avance.
El cilindro superior, de 5.30 m de diámetro, estaba destinado a
los locales habitables (sollados, equipos, armamento), mientras que en el inferior,
de 3,5 m estaban alojadas las baterías.
El material utilizado en su construcción fue el acero especial
�Wotan-Weich�. Las planchas, de 26 mm de espesor a media eslora, pasaban a 18
mm en sus extremidades. En conjunto, la resistencia estructural fue muy cuidada,
adoptándose una estructura con cuadernas separadas 80 cm en gran parte
del casco, pero que pasaba a ser de 40 cm en los extremos. Las cotas de prueba
resultantes fueron bastante considerables:133 m en servicio normal, 220 m en
combate, 330 m en deformación teórica.
Además, a estas Profundidades en la que podía operar el tipo XXI, le permitía ubicarse fuera del alcance efectivo del sonar de los aliados el cual era de 122 m. La forma estilizada de su casco y vela hacia que expusiera una pequeña sección transversal al sonar enemigo; haciendo que el eco del mismo disminuyera en consecuencia y este efecto fue reforzado en algunos casos con el uso de recubrimientos del casco anti-radar y anti-sonar. Este adelanto tecnológico se usa actualmente en submarinos nucleares y no nucleares modernos, los cuales están recubiertos en todo el casco con baldosas de goma o sustancias especiales.
El casco externo estaba
formado en torno a una quilla de 41,6 m de longitud y construido con chapas
de acero especial de 4-6 mm de espesor. Se puso especial cuidado en eliminar
los salientes (bitas, cabrestantes, escóbenes, etc.) y las aristas. Aparte
de los ejes y las hélices, los únicos salientes fueron los timones
de profundidad y el de dirección, rectangular compensado, de 8 m2 de
superficie por 35° de carrera.
 Los XXI resultaron poco maniobrables
a causa de la excesiva finura de sus formas: incluso en inmersión (o
sea en condiciones más favorables que en superficie) el radio de virada
seguía siendo del orden de los 400 m. Esta fue la razón de que
se estudiasen versiones dotadas de tubos orientados hacia atrás (1) (incluso
empleando torpedos de limitada capacidad de orientación) sin necesidad
de invertir la ruta cuando el blanco se presentaba de popa. En el espacio situado
entre ambos cascos se instalaron las sentinas, los tanques de trimado, los de
rápida y los fijos. El volumen total de los lastres de rápida
era de 212,34 m3, correspondiente a un 13 % del empuje de flotación.
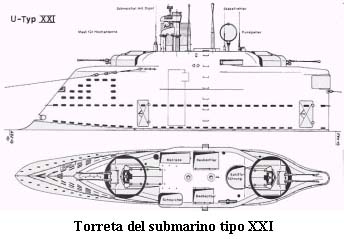
La torreta debía en un principio haber estado dotada de puente acorazado
y cúpula de observación retráctil, pero finalmente se adoptó
un modelo a base de torreta resistente interna y falsa torreta o vela externa.
Los XXI resultaron poco maniobrables
a causa de la excesiva finura de sus formas: incluso en inmersión (o
sea en condiciones más favorables que en superficie) el radio de virada
seguía siendo del orden de los 400 m. Esta fue la razón de que
se estudiasen versiones dotadas de tubos orientados hacia atrás (1) (incluso
empleando torpedos de limitada capacidad de orientación) sin necesidad
de invertir la ruta cuando el blanco se presentaba de popa. En el espacio situado
entre ambos cascos se instalaron las sentinas, los tanques de trimado, los de
rápida y los fijos. El volumen total de los lastres de rápida
era de 212,34 m3, correspondiente a un 13 % del empuje de flotación.
La torreta debía en un principio haber estado dotada de puente acorazado
y cúpula de observación retráctil, pero finalmente se adoptó
un modelo a base de torreta resistente interna y falsa torreta o vela externa.
Aparato motor
Particularmente original
fue la adopción del sistema diesel-eléctrico para la navegación
en superficie, y con snorkel y el empleo de motores eléctricos especiales
para la navegación silenciosa.
Los dos motores diesel eran de tipo MAN MGV40/46, de 6 cilindros y 4 tiempos,
con 400 mm de diámetro y 460 mm de carrera, cilindrada de 57,8 l y sobrealimentación
por turbocompresor (2), acoplados a los generadores por medio de reductores
mecánicos. Los regímenes de operación eran: 522 r.p.m.
(2000 hp) en superficie a velocidad máxima, 470 r.p.m. (1400 hp) con
el snorkel y 315 r.p.m. a velocidad económica.
Los motores eléctricos
principales eran 2 Siemens-Schokert Werke SSW GU 365/30 Herta, que desarrollaban
2500 hp a 1675 r.p.m. unitariamente a toda máquina. Estaban construidos
a base de un doble inducido sobre núcleo magnético y dieron excelente
rendimiento. Los motores para navegación silenciosa eran también
2, tipo SSW GV 323/28, de 113 hp unitarios, con alimentación a 120 o
360 V. Las baterías eran 6, tipo 44 MAL 740E, de 62 elementos cada una
y revestimiento de caucho sintético Milopam.
La propulsión estaba asegurada por 2 hélices tripalas de
2,150 m de diámetro por unos 1,67 m2 de superficie de pala, contra rotatorias
(dextrógira la de estribor y viceversa) para compensar las desviaciones
debidas al par motor (3).
Las prestaciones estuvieron a la altura de las previsiones: 15,5 nudos
de velocidad máxima en superficie con los diesel a toda potencia, 18,08
con diesel-eléctrico, 17,94 con solo los motores eléctricos, 10,4
nudos en inmersión con snorkel y 6,1 nudos en navegación silenciosa.
 El snorkel, aparato que permitía
introducir aire para los diesel, los cuales propulsaban al submarino en inmersión
y a la vez recargaban por medio de los generadores las baterías; era
un invento holandés que fue perfeccionado por los alemanes. En el caso
de este buque consistía de dos tubos, por uno ingresaba el aire y por
el de popa expulsaban el gas de los diesel a través de unos agujeros
pequeños en el tubo debajo de la línea de agua. En su extremo
existía una válvula flotante en forma de esfera que cortaba la
entrada de aire cuando una ola sumergía la cabeza del snorkel. En los
primeros modelos de snorkel, cuando se cerraba la válvula; los diesel
tomaban aire del interior y producían un vacío muy fuerte que
hacian saltar los ojos de las órbitas y aflojaban las amalgamas de los
dientes de la tripulación. En el tipo XXI existía un interruptor
que cortaba los diesel cuando se sumergia el snorkel y evitaban estos problemas;
con la mejora adicional de que el extremo de este snorkel emergía más
alto que los primeros modelos permitiendo usarlo en mar agitada. Este dispositivo
le daba al submarino una gran inmunidad frente al radar debido a su tamaño
y a la longitud de onda del mismo en esa época. Además estaba
recubierto con una sustancia sintética con la función de absorver
las ondas del radar, similar a las técnicas stealth o furtivas de ahora.
Como complemento, en el extremo superior del snorkel existía una antena
detectora de emisiones radar �FuMB ant 3/Bali I�.
El snorkel, aparato que permitía
introducir aire para los diesel, los cuales propulsaban al submarino en inmersión
y a la vez recargaban por medio de los generadores las baterías; era
un invento holandés que fue perfeccionado por los alemanes. En el caso
de este buque consistía de dos tubos, por uno ingresaba el aire y por
el de popa expulsaban el gas de los diesel a través de unos agujeros
pequeños en el tubo debajo de la línea de agua. En su extremo
existía una válvula flotante en forma de esfera que cortaba la
entrada de aire cuando una ola sumergía la cabeza del snorkel. En los
primeros modelos de snorkel, cuando se cerraba la válvula; los diesel
tomaban aire del interior y producían un vacío muy fuerte que
hacian saltar los ojos de las órbitas y aflojaban las amalgamas de los
dientes de la tripulación. En el tipo XXI existía un interruptor
que cortaba los diesel cuando se sumergia el snorkel y evitaban estos problemas;
con la mejora adicional de que el extremo de este snorkel emergía más
alto que los primeros modelos permitiendo usarlo en mar agitada. Este dispositivo
le daba al submarino una gran inmunidad frente al radar debido a su tamaño
y a la longitud de onda del mismo en esa época. Además estaba
recubierto con una sustancia sintética con la función de absorver
las ondas del radar, similar a las técnicas stealth o furtivas de ahora.
Como complemento, en el extremo superior del snorkel existía una antena
detectora de emisiones radar �FuMB ant 3/Bali I�.
El snorkel era retráctil y cuando se dejaba de usar, se retraía
en la estructura de la vela en una cavidad al efecto y dejando limpio de este
modo el flujo de agua para la navegación de la nave.
Bibliografía:
Submarinos, la amenaza secreta, por David Mason, Editorial San Martín,
Historia del siglo de la Violencia, libro n°28.
Marine-Rundschau, Vom Original zum Modell: Uboottyp XXI, por Fritz Köhl,
Bernard & Graefe Verlag.
U-Boats in action, squadron/signal publications, Warships NO.1, por Robert C.
Stern y Don Greer.
La Marina, Perfiles, Volumen III, Editorial Delta, s.a.
Modern Submarine Warfare, por David Miller y John Jordan, Salamander Books Ltd.
 TECNOLOGIA
NAVAL
TECNOLOGIA
NAVAL