POSICIÓN INICIAL
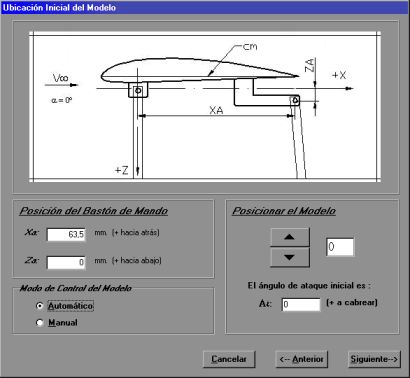
La próxima pantalla setea la posición inicial del modelo, el control del movimiento de cabeceo del modelo es un sistema de lazo abierto, se determina la posición inicial y la posición final a la que se desea llegar, el programa calcula el movimiento necesario del motor según la geometría que define el modelo junto a los soportes, debido a esto los valores iniciales de posición deben ser los más exactos posibles, para obtener un variación del ángulo de incidencia del modelo con buena precisión.
Los datos a ingresar son:
-
Xa la distancia horizontal entre ejes en los extremos de los soportes, positiva hacia atrás, corriente abajo, de la primer columna, en milímetros.
-
Za distancia vertical entre ejes en los extremos de los soportes, positiva debajo del eje de la primer columna, en unidades de milímetros.
-
Ai ángulo de ataque inicial del modelo que resulta de las dimensiones anteriores, el ángulo de inclinación se toma como el ángulo entre la línea de referencia del modelo, como ser la cuerda y la dirección del viento, positivo a cabrear, en grados.
Se debe notar que las tres medidas son para la misma posición del modelo, es decir cuando el modelo se encuentra con un ángulo de inclinación igual a Ai, las medidas de Xa y Za son las ingresadas en pantalla.
Si es necesario mover el modelo para alcanzar la posición inicial se dispone de un control de inclinación del modelo, con los dos sentidos posibles de variación, a cabrear o picar.
Se recomienda obtener los valores de Xa, Za y Ai de un gráfico a escala del conjunto y corroborar con una medición directa en el modelo, este es un método muy útil sobre todo si no se tiene acceso a algunos de los ejes por encontrarse dentro del modelo
Por ultimo tenemos la elección del modo de control y toma de datos de la balanza:
-
Modo automático el programa ejecuta una corrida de medición sobre un rango preestablecido del ángulo de incidencia y almacena los valores obtenidos.
-
Modo manual dispone del control de la incidencia del modelo y almacenamiento de las mediciones ángulo a ángulo.
El modo manual permite aumentar progresivamente el ángulo de inclinación del modelo a voluntad, esto es sumamente útil cuando no se conoce las máximas cargas aerodinámicas sobre el modelo ó no se sabe hasta que posición se puede inclinar el modelo. Una vez conocidos estos datos se puede operar en modo automático una corrida en el rango efectivo.