chapter 2
Finite Element Method and mesh generation
The ideas that gave birth to the Finite Element Methods (FEM) evolved gradually from the independent contributions of many people in the fields of engineering, applied mathematics, and physics.
Hrenikoff (1941) found out that the elastic behavior of a
physically continuous plate would be similar, under certain loading conditions,
to a framework of physically separate one-dimensional rods and beams, connected
together as discrete points. The problem then handled for trusses and
frameworks with similar computational methods.
Courant’s (1943) paper is a classic for finite element methods. To solve the torsion problem in elasticity, he defined piecewise linear polynomials over a triangularized region. Schoenberg’s (1946) paper gave birth to the theory of splines, recommending the use of piecewise polynomials for approximation and interpolation. Synge (1957) used piecewise linear functions defined over triangularized region with a Reitz variational procedure.
With the introduction of high-speed digital computers, Langefors (1952) and Argyris (1954) took the framework analysis procedures and reformulated them into a matrix format suited for efficient automatic computation. McMahon (1953) solved a three-dimensional electrostatic problem using tetrahedral elements and linear trial functions. Polya (1954), Hersh (1955), and Weinberger (1956) used ideas similar to Courant’s to estimate bounds for eigenvalues.
2.1. Basics of Finite Element Methods
2.2. Mesh Generation in the Great Bay Estuary System
In order to use ADAM model (see next chapter for detail), a mesh defining the system of interest with triangular elements is needed. A public domain search for mesh generation software uncovers two results:
· MESHTOOLS developed for MATLAB by Tom Gross from Skidaway Institute of Oceanography, Savannah, Georgia and
· TRIANGLE developed by Jonathan Richard Shewchuk from the Carnegie Mellon University, Pittsburgh, Pennsylvania as a part of the parallel FEM tools generation project Archimedes.
2.2.1. FE Mesh Generation Tool, TRIANGLE
Basic finite element mesh generation is almost a standard
procedure. It consists of a Delaunay triangulation routine complemented with
refinement and interpolation routines. A Delaunay triangulation of a point set
is a triangulation of the point set with the property that no point in the point
set falls in the interior of the circumcircle (circle that passes through all
three vertices) of any triangle in the triangulation. The circumcircle
of a triangle is the unique circle that passes through all three vertices of
the triangle (Shewchuk,1996).
A triangle is said to be bad if it has an angle too small or an area too large to satisfy the user's constraints. A bad triangle is split by inserting a vertex at its circumcenter (the center of its circumcircle); the Delaunay property guarantees that the triangle is eliminated.
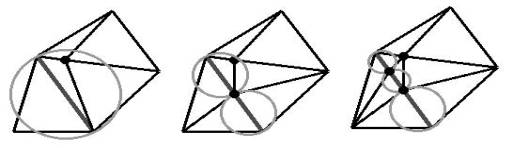
Figure 2-1. Each bad triangle is split by
inserting a vertex at its circumcenter and maintaining the Delaunay property.
TRIANGLE can generate meshes in two different ways. The first one is by reading a PSLG file with an extension (.poly), which can specify points, segments (shorelines), holes (islands), and regional attributes and area constraints. A Planar Straight Line Graph (PSLG) is a collection of points and segments. Segments are simply edges whose endpoints are points in the PSLG. The second way is by reading a standard node and an element connectivity file. The node files have an extension (.node) and the element files have an extension (.ele). In this study, a PSLG file was used to generate the initial mesh. TRIANGLE generates exact Delaunay triangulations, constrained Delaunay triangulations and conforming Delanuay triangulations.
A constrained Delaunay triangulation of a PSLG is similar to a Delaunay triangulation but each PSLG segment is present as a single edge in the triangulation. A conforming Delaunay triangulation of a PSLG is a true Delaunay triangulation in which each PSLG segment may have been subdivided into several edges by the insertion of additional points. These inserted points are necessary to allow the segments to exist in the mesh while maintaining the Delaunay property.
Conforming Delaunay triangulation of a PSLG can be generated with no small angles and are thus suitable for finite element analysis. TRIANGLE is capable of refining already existing meshes by imposing maximum triangle areas or by defining minimum element angles. In this way, attributes belonging to each node are also interpolated.
2.2.2. Extracting Data for the Mesh Generation
2.2.3. Preliminary Meshes for the Great Bay Estuary System
The
sub-domains include the following meshes (see Table 2-1.):
Table 2- 1.
Numeric and geomorphologic properties of the
preliminary meshes used during the modeling efforts for the Great Bay Estuary
system. All the coordinates are given
in New Hampshire State Plane coordinate system (NAD83).
|
|
|
||||
|
|
|
||||
|
|
|
||||
|
|
|
||||
|
|
|
||||
|
|
|
||||
|
|
|
||||
|
|
|
||||
.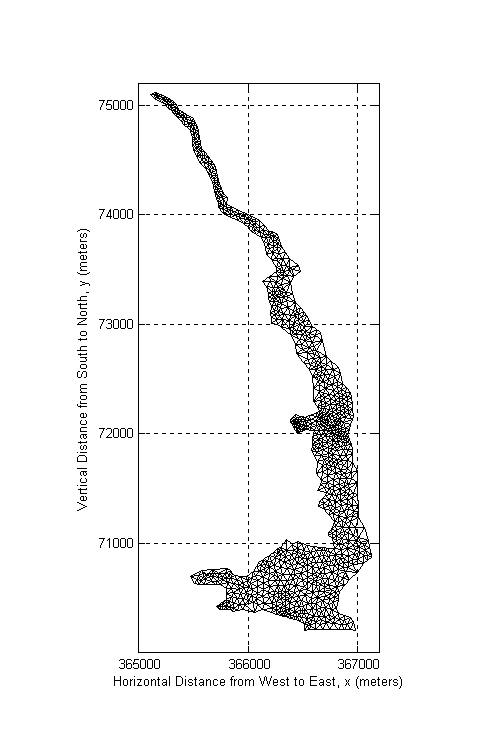
Figure 2-2. Bellamy River (BR5) mesh has 1054 nodes and 1828
triangular elements. Maximum depth value in this section is 7.1m.
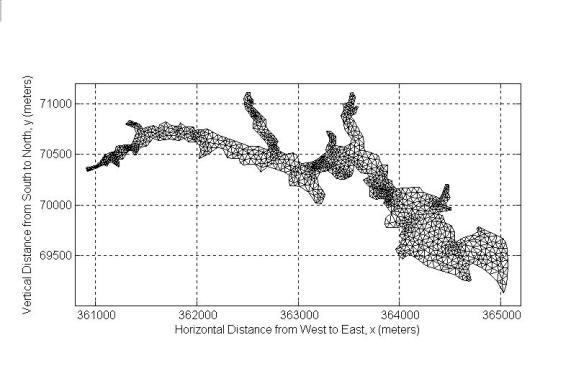
Figure 2-3. Oyster River (YR5) mesh has 1409 nodes and 2415
elements. Maximum depth value in this section is 8.79m.
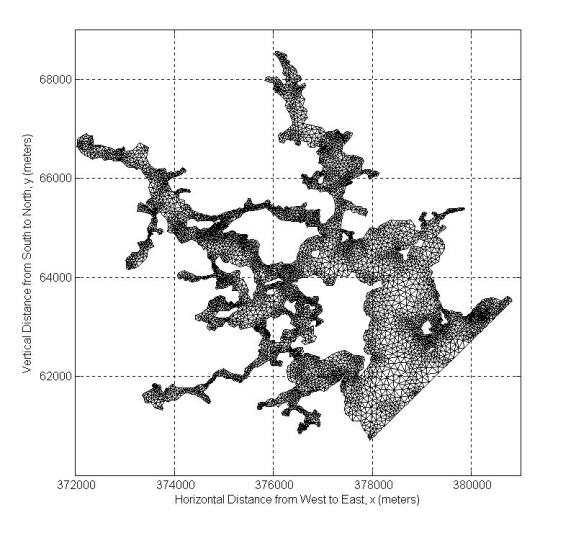
Figure 2-4. Portsmouth Harbor (port3) mesh has 8577 nodes and
14974 elements. Maximum depth value in this section is 25.4m.
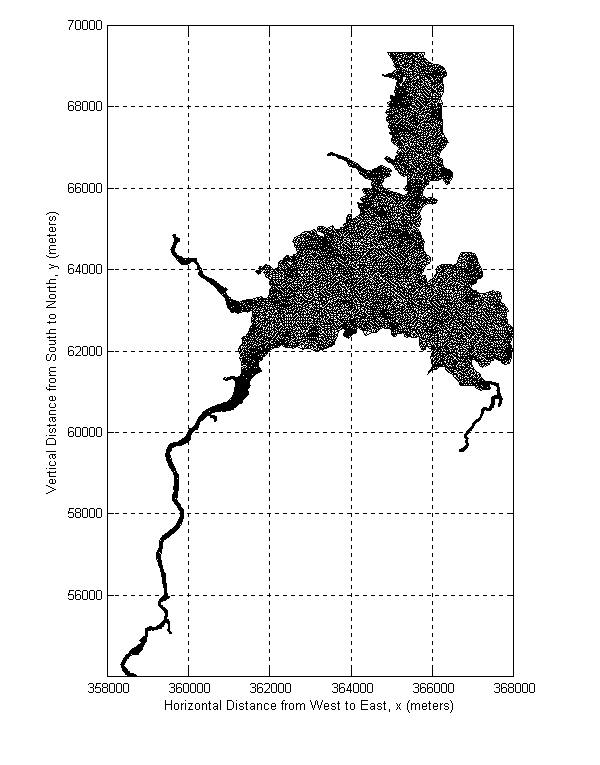
Figure 2-5. Great Bay (gbay6) mesh has 10439 nodes and 18526
elements. Maximum depth value in this section is 21.8m.
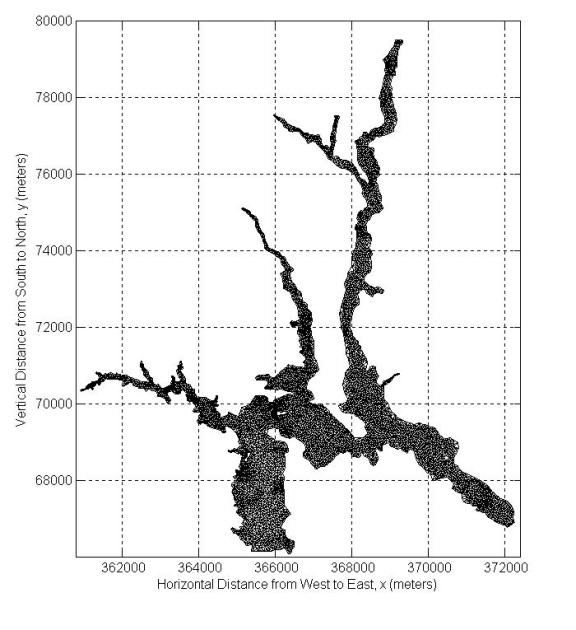
Figure 2-6. Three River (pby) mesh has 8621 nodes and 15404
elements. Maximum depth value in this section is 23.0m.
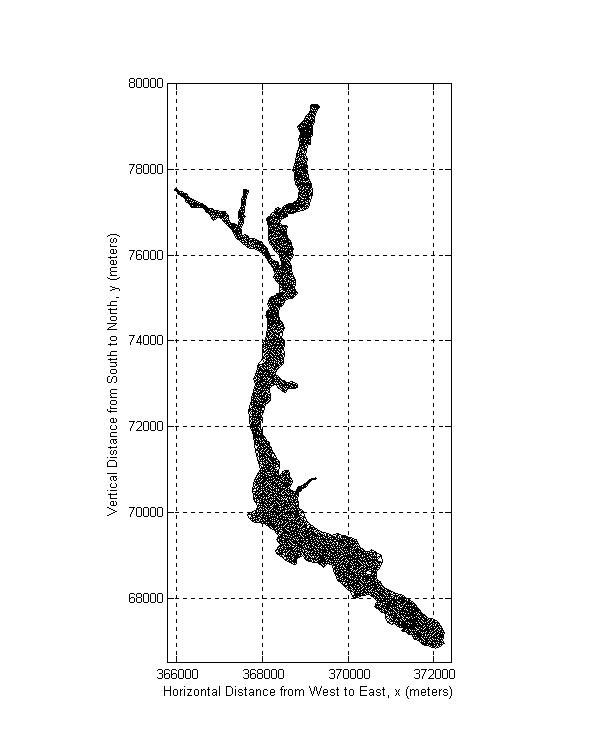
Figure 2-7. Piscataqua River (pr6) mesh 3417 nodes and 6043
elements. Maximum depth value in this section is 18.93m.
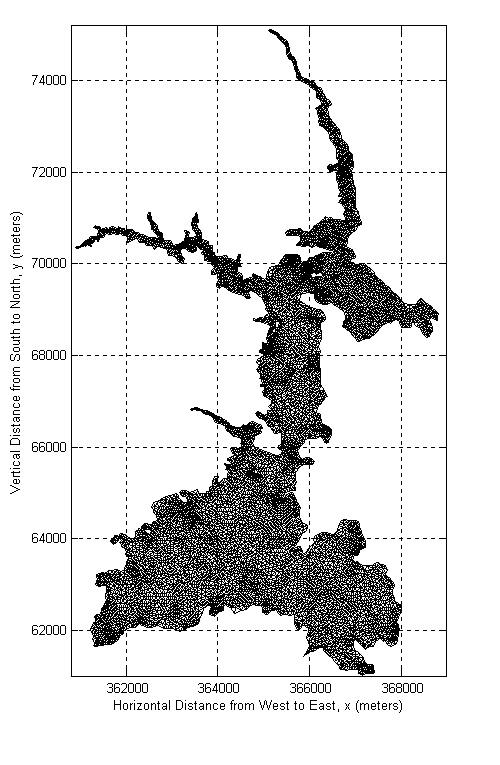
Figure 2-8. Great Bay (gbriv)
mesh with the Oyster and Bellamy rivers has 10223 nodes and 18710 elements.
Maximum depth value in this section is 23.0m.
Figure 2-9. Portsmouth Harbor and Piscataqua River (phriv) mesh
has 12113 nodes and 21235 elements. Maximum depth value in this section is
25.4m.
All the above-mentioned meshes are then merged and some small tributaries are cut and the GBES4 mesh is obtained. GBES4 is the master mesh, which is used for simulating the whole estuary. The master mesh is cut into pieces when needed for individual purposes.
The bathymetry in the channels in Great Bay area is then fine-tuned with the data obtained through personal communications with Dr. Fred Short at Jackson Estuarine Laboratory. The mesh with the detailed bathymetry in the Great Bay section is called the “gbay18” mesh. The details of this mesh with the bathymetry contours are shown in Figure 2-10.
Figure
2-10. Bathymetry contours and the final mesh detail of the
gbes18 mesh.

![[back]](../images/home.gif)